// Overview
Abstract
This project demonstrates a self-leveling stabilization system using an ESP32 microcontroller and MPU6050 sensor. The system detects tilt angles and automatically adjusts a servo motor to maintain a horizontal position in real time.
// Goals
Objective
- Maintain stable horizontal orientation automatically
- Learn sensor-based control systems
- Build a simple but effective stabilizer mechanism
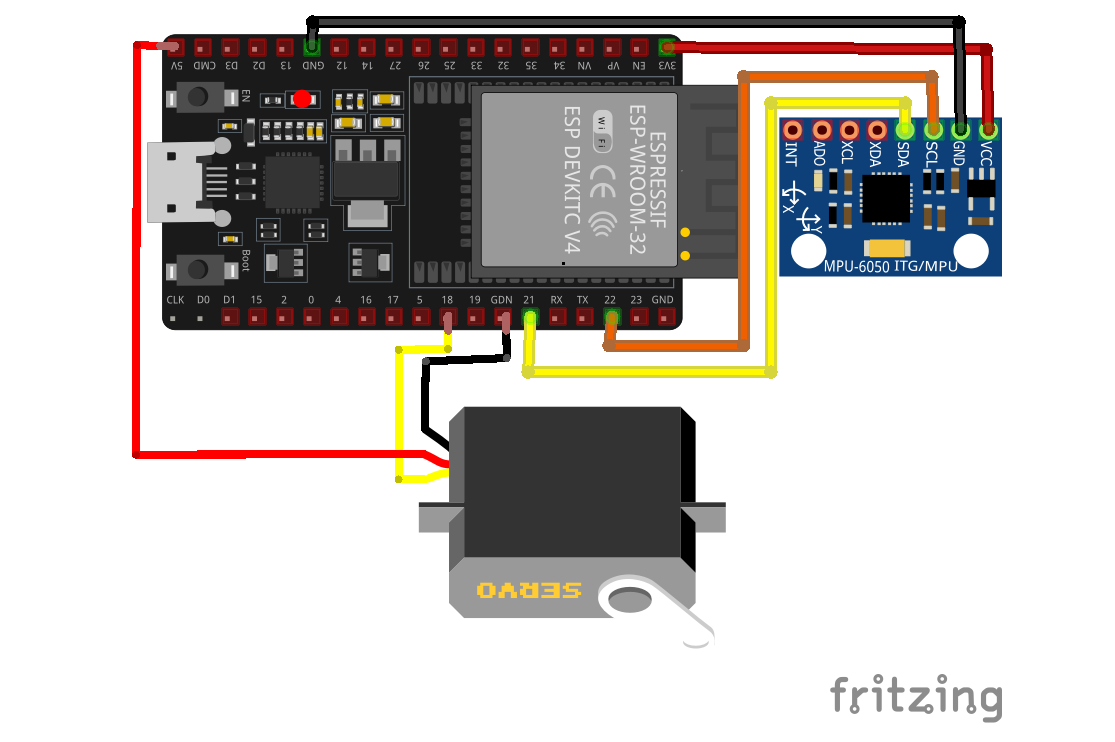
// Hardware
Components
ESP32
MPU6050 Sensor
Servo Motor
Breadboard
// How It Works
Working Principle
The MPU6050 sensor measures tilt using its accelerometer data on X and Y axes. The ESP32 processes this data and calculates the exact angle of inclination. Based on the calculated angle, the servo motor moves in the opposite direction to counteract the tilt and stabilize the platform in real time.
// Source Code
Code
#include <Wire.h>
#include <MPU6050.h>
#include <ESP32Servo.h>
MPU6050 mpu;
Servo servo;
float angle;
void setup() {
Wire.begin(21, 22);
mpu.initialize();
servo.attach(18);
}
void loop() {
int16_t ax, ay, az;
mpu.getAcceleration(&ax, &ay, &az);
angle = atan2(ay, az) * 180 / PI;
int servoPos = map(angle, -90, 90, 0, 180);
servoPos = constrain(servoPos, 0, 180);
servo.write(180 - servoPos);
delay(20);
}
✓ Results
- Stable response to tilt
- Smooth servo correction
- Real-time balancing
↑ Future Improvements
- PID control system
- Kalman filter for accuracy
- Dual-axis stabilization