
// Overview
About This Project
In this project, I built a small smart car using the ESP32 microcontroller. The car can be controlled wirelessly via Bluetooth using a smartphone. The phone sends commands (F, B, L, R, S) and the ESP32 controls the motor driver to move the car in any direction.
// Features
Main Features
- Control the car using a smartphone over Bluetooth
- Forward, backward, left, and right movement
- Simple stop command support
- Beginner-friendly and easy to build
// Hardware
Required Components
ESP32 Board
Motor Driver L298N
2–4 DC Motors
Car Chassis
18650 / Li-Po Battery
Jumper Wires
Wheels
Smartphone
// Control App
Download App
Install the Bluetooth Car Controller app on your Android smartphone to control the car:
Install on Google Play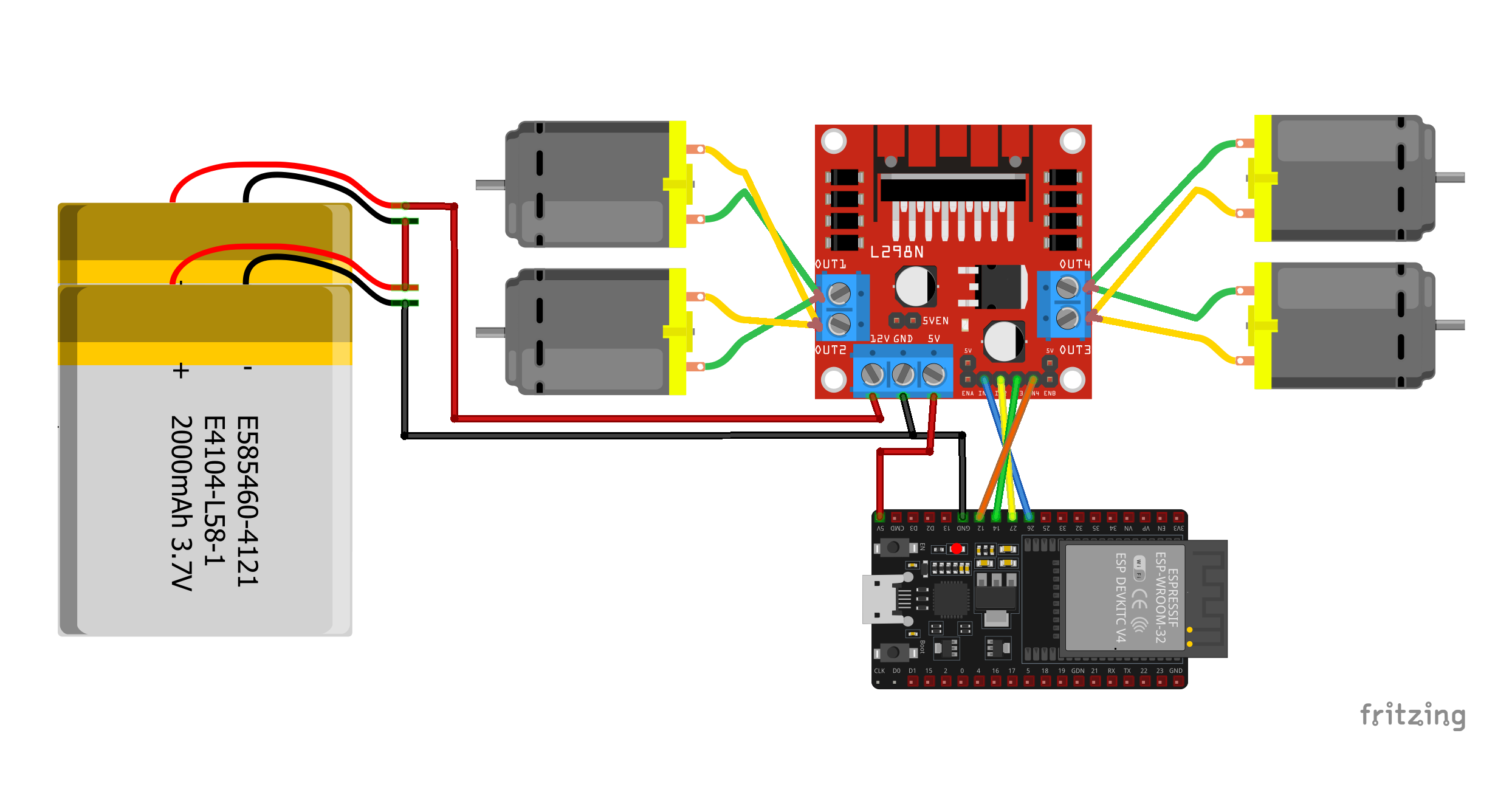
// Source Code
ESP32 Code
#include "BluetoothSerial.h"
BluetoothSerial SerialBT;
int IN1 = 26;
int IN2 = 27;
int IN3 = 14;
int IN4 = 12;
void forward();
void back();
void left();
void right();
void stopCar();
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
stopCar();
SerialBT.begin("ESP32_CAR");
}
void loop() {
if (SerialBT.available()) {
char c = SerialBT.read();
if (c == 'F') forward();
else if (c == 'B') back();
else if (c == 'L') left();
else if (c == 'R') right();
else if (c == 'S') stopCar();
}
}
void forward() {
digitalWrite(IN1, 1);
digitalWrite(IN2, 0);
digitalWrite(IN3, 1);
digitalWrite(IN4, 0);
}
void back() {
digitalWrite(IN1, 0);
digitalWrite(IN2, 1);
digitalWrite(IN3, 0);
digitalWrite(IN4, 1);
}
void left() {
digitalWrite(IN1, 0);
digitalWrite(IN2, 1);
digitalWrite(IN3, 1);
digitalWrite(IN4, 0);
}
void right() {
digitalWrite(IN1, 1);
digitalWrite(IN2, 0);
digitalWrite(IN3, 0);
digitalWrite(IN4, 1);
}
void stopCar() {
digitalWrite(IN1, 0);
digitalWrite(IN2, 0);
digitalWrite(IN3, 0);
digitalWrite(IN4, 0);
}
✓ Results
- Smooth Bluetooth control
- Reliable motor response
- Easy to extend with sensors
↑ Future Improvements
- Speed control with PWM
- Obstacle avoidance (ultrasonic)
- Web-based WiFi control
- Camera streaming