Code for ESP32
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
float ax, ay, az;
float pitch, roll;
void setup() {
Serial.begin(115200);
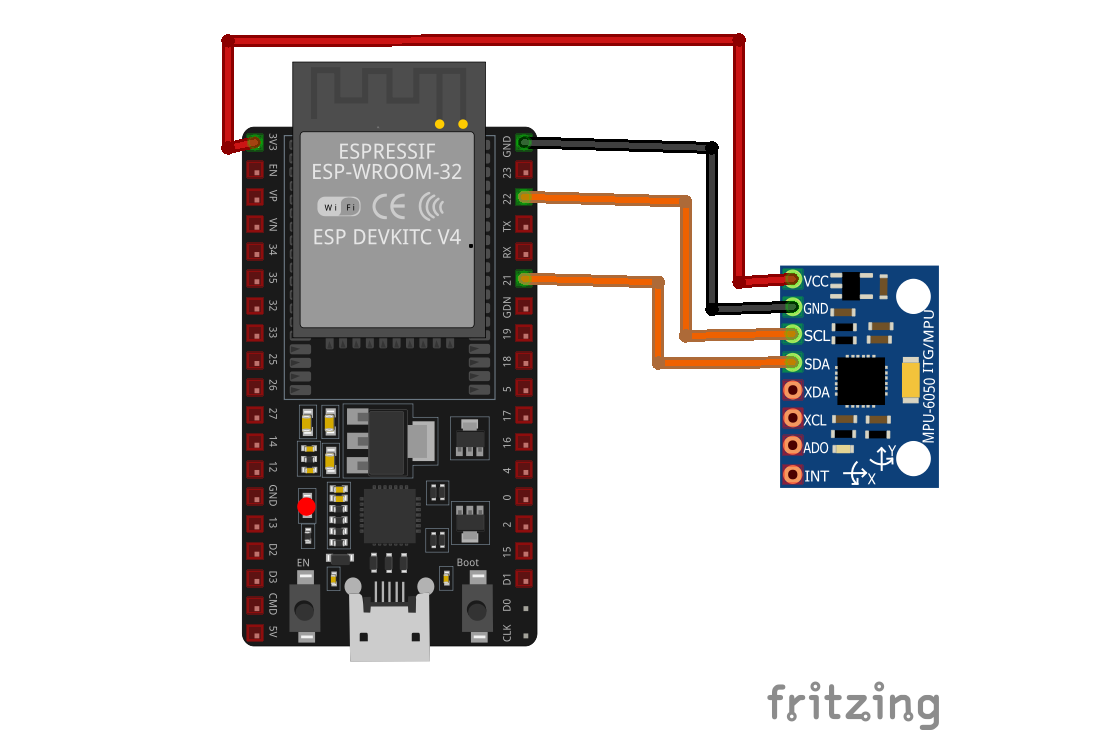
Wire.begin(21, 22); // ESP32 I2C
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("MPU6050 ERROR");
while (1);
}
}
void loop() {
mpu.getAcceleration(&ax, &ay, &az);
pitch = atan2(ax, sqrt(ay * ay + az * az)) * 180 / PI;
roll = atan2(ay, az) * 180 / PI;
// Формат барои Processing
Serial.print(pitch);
Serial.print(",");
Serial.println(roll);
delay(20); // ~50Hz
}
Code for Processing
import processing.serial.*;
Serial myPort;
float pitchRaw = 0;
float rollRaw = 0;
float pitch = 0;
float roll = 0;
float alpha = 0.08;
int R = 200;
void setup() {
size(600, 600);
smooth(8);
println(Serial.list());
myPort = new Serial(this, Serial.list()[0], 115200);
myPort.bufferUntil('\n');
}
void draw() {
background(15);
translate(width/2, height/2);
// smoothing
pitch -= (pitchRaw + pitch) * alpha;
roll += (rollRaw - roll ) * alpha;
// ================= MOVING PART =================
push();
clip(-R, -R, R*2, R*2);
pushMatrix();
rotate(radians(-roll));
float p = pitch * 4;
// SKY
noStroke();
fill(70, 140, 200);
rect(-600, -600 + p, 1200, 600);
// GROUND
fill(160, 100, 60);
rect(-600, p, 1200, 600);
// HORIZON
stroke(255, 220, 0);
strokeWeight(4);
line(-250, p, 250, p);
// ===== PITCH LADDER =====
stroke(255);
strokeWeight(2);
textSize(12);
textAlign(CENTER, CENTER);
for (int deg = -30; deg <= 30; deg += 5) {
if (deg == 0) continue;
float y = p + deg * 4;
if (abs(y) < R - 20) {
float len = (deg % 10 == 0) ? 120 : 60;
// line
line(-len/2, y, len/2, y);
// numbers only every 10°
if (deg % 10 == 0) {
fill(255);
text(abs(deg), -len/2 - 15, y);
text(abs(deg), len/2 + 15, y);
noFill();
}
}
}
popMatrix();
noClip();
pop();
// ================= STATIC SCALE =================
drawStaticScale();
// AIRCRAFT SYMBOL
stroke(255, 220, 0);
strokeWeight(4);
line(-30, 0, 30, 0);
line(0, 0, 0, 18);
}
void drawStaticScale() {
// outer ring
noFill();
stroke(230);
strokeWeight(6);
ellipse(0, 0, R*2, R*2);
// roll ticks & numbers
stroke(220);
strokeWeight(3);
textAlign(CENTER, CENTER);
textSize(14);
fill(220);
for (int a = -90; a <= 90; a += 10) {
float ang = radians(a - 90);
float x1 = cos(ang) * (R - 10);
float y1 = sin(ang) * (R - 10);
float x2 = cos(ang) * (R - (a % 30 == 0 ? 30 : 20));
float y2 = sin(ang) * (R - (a % 30 == 0 ? 30 : 20));
line(x1, y1, x2, y2);
if (a % 30 == 0 && a != 0) {
float xt = cos(ang) * (R - 45);
float yt = sin(ang) * (R - 45);
text(abs(a), xt, yt);
}
}
// top triangle
fill(255, 220, 0);
noStroke();
triangle(0, -R + 8, -8, -R + 25, 8, -R + 25);
}
void serialEvent(Serial myPort) {
String data = myPort.readStringUntil('\n');
if (data != null) {
data = trim(data);
String[] v = split(data, ',');
if (v.length == 2) {
pitchRaw = float(v[0]);
rollRaw = float(v[1]);
}
}
}